Portfolio 📂
Education🎓 • Experiences🛰️ • Projects🛠️
Résumé 📄: View & Download PDF
Education 🎓
California Institute of Technology, EE, Expected May 2025, M.S.
Cornell University, ECE|CS Minor, GPA: 3.978 (Magna Cum Laude), B.S.
Dean’s Honor List, Tau Beta Pi Member
Experiences 🛰️
SSDS, Alpha Mission, ACS Engineer/Undergraduate Researcher
I worked on a 1U CubeSat projected to be launched in 2024, the Alpha Cubesat, advised by Prof. Mason Peck at Cornell Space System Design Studio (SSDS). I developed the Attitude Control System (ACS) in SIMULINK, deployed with C++, designed Extended Kalman Filters (EKF) and moving kernel filters for attitude determination and denoising, analyzed noise characteristics, optimized parameters using Monte Carlo methods, and debugged issues with sensing, actuation, and controller timing. I am integrated the attitude control algorithms into the overall flight software, with hardware-in-the-loop verification.
Research Summary • Github Repo
Cornell Motion Studio, Drone Researcher

I developed a drone from the ground up for the Cornell Motion Capture Studio, advised by Prof. Brian Kirby. Intended for use in various ECE/MAE classes, the drone’s flight controller is designed to be based on the Raspberry Pi Pico W, and its flight software is written in pure C. I developed the low-level libraries for the Electronic Speed Control (ESC), Inertial Measurement Unit (IMU) , the Radio Receiver. On top of these, I designed the sensor fusion filter system for denoising and state estimation, and a PID controller. I also designed the PCB.
Cornell SmallSat Mission Design School(SMDS 2023), Telemetry, Tracking and Command Lead

I served as the Telemetry, Tracking, and Command (TT&C) Lead for the STARLITE(Superluminous Tomographic Atmospheric Reconstruction with Laser-beacons for Imaging Terrestrial Exoplanets) mission in the SMDS program. I collaborated with engineers and scientists around the world on a small satellite mission following the standard of the NASA Pioneer program. My work involved devising innovative methods for long-range communication and tracking, with these strategies being subsequently validated by Link Budget calculations. I contributed to a conference paper on SPIE.
Summer Intern at the WCSL, UCSB, Undergraduate Researcher
I worked on Adversarial Machine Learning studies at the Wireless Communication and Sensornets Laboratory with Prof. Upamanyu Madhow, experimented with different adversarial machine learning attacks in modern Computer Vision studies, and the effective ways to protect models.
Cornell University, Teaching Assistant
I TAed for ECE 2720: Data Science for Engineers for Prof. Aaron Wagner, during which I Held weekly Office Hours, graded/created assignments, and answered questions.
Projects 🛠️
“PICOBOI”: RP2040 Based Handheld Gaming Device w/ GPS
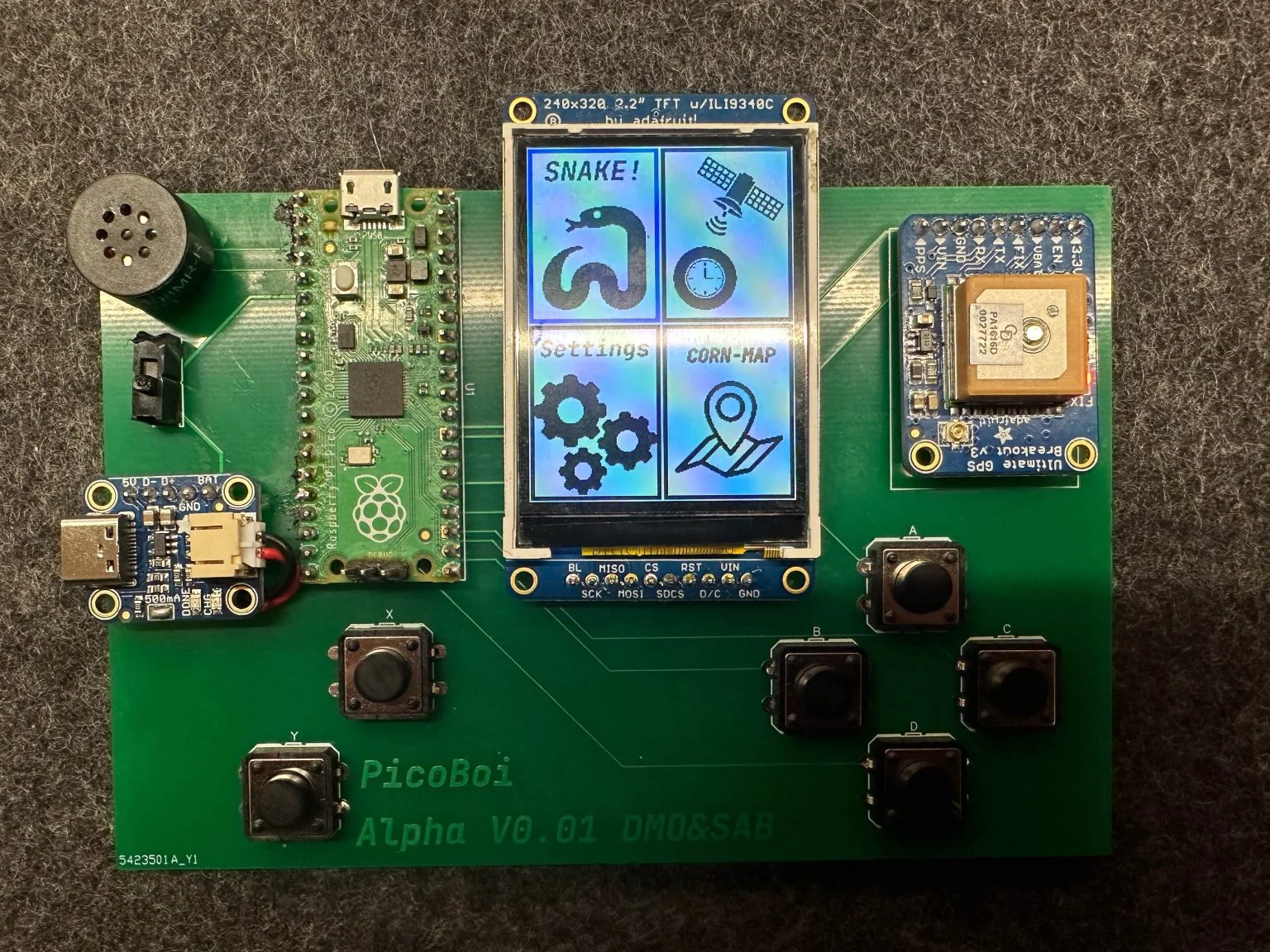
“PicoBoi” is a Gameboy-like device with modern features. Its hardware includes a charging system, speaker, GPS module, button pad, and screen.
With the cooperation of PicoBoi’s software, a multi-threaded environment that supports isolation of applications coded with C, users can access or create different applications without interference. A unique snake game has been developed, in which the snake can move diagonally while original retrospective music plays in the background, and the difficulty level can be adjusted in the settings. Additionally, a library has been designed for the GPS module, as the official library is designed for Arduino boards. With the GPS module, users can obtain accurate time from the satellite and track their location on the map.
This project is being published on Circuit Cellar (Dec 23 Issue#401, Pg 12-18)
“TidyPlotter”: Image Sketcher with a Robust Design
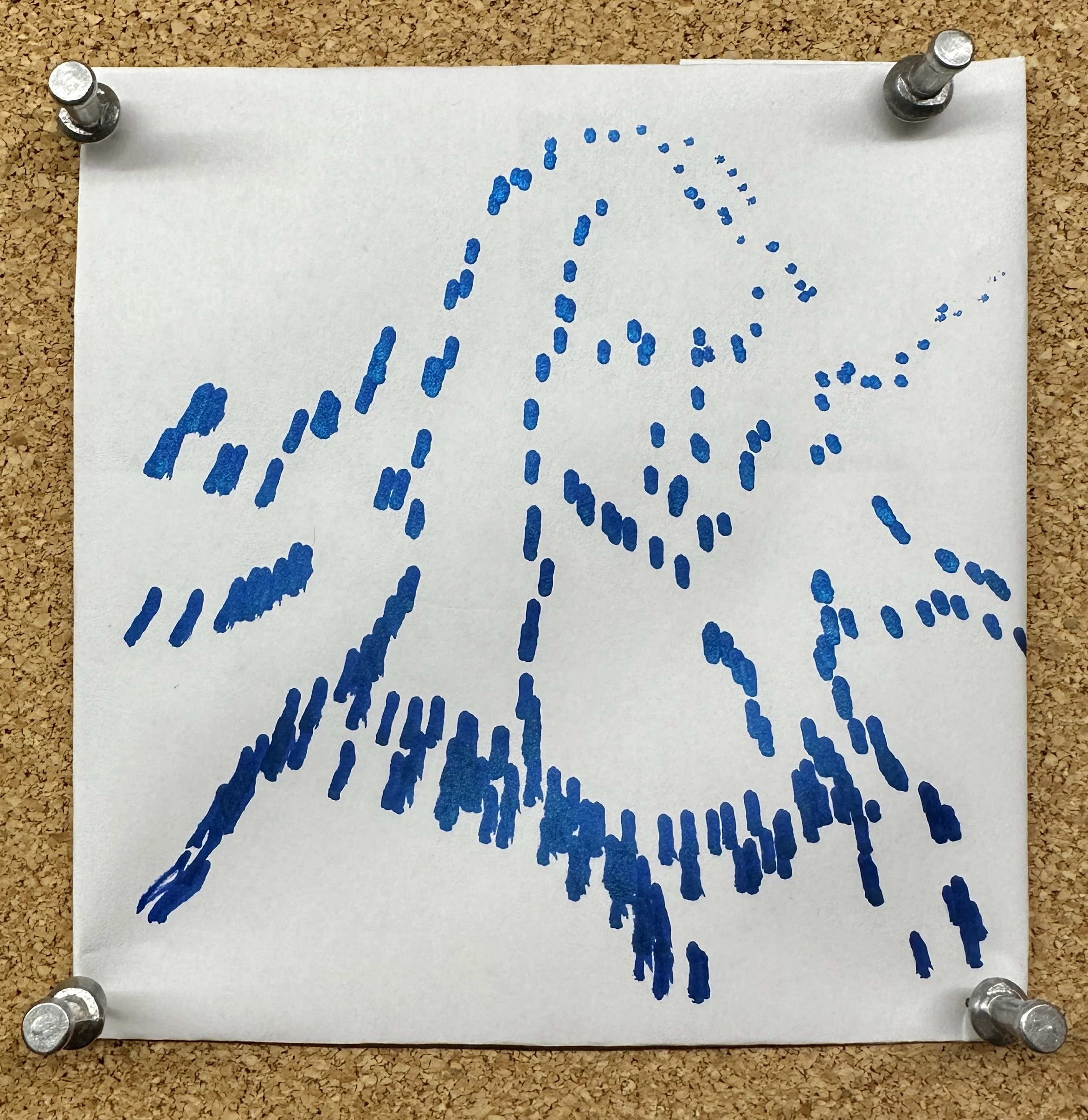
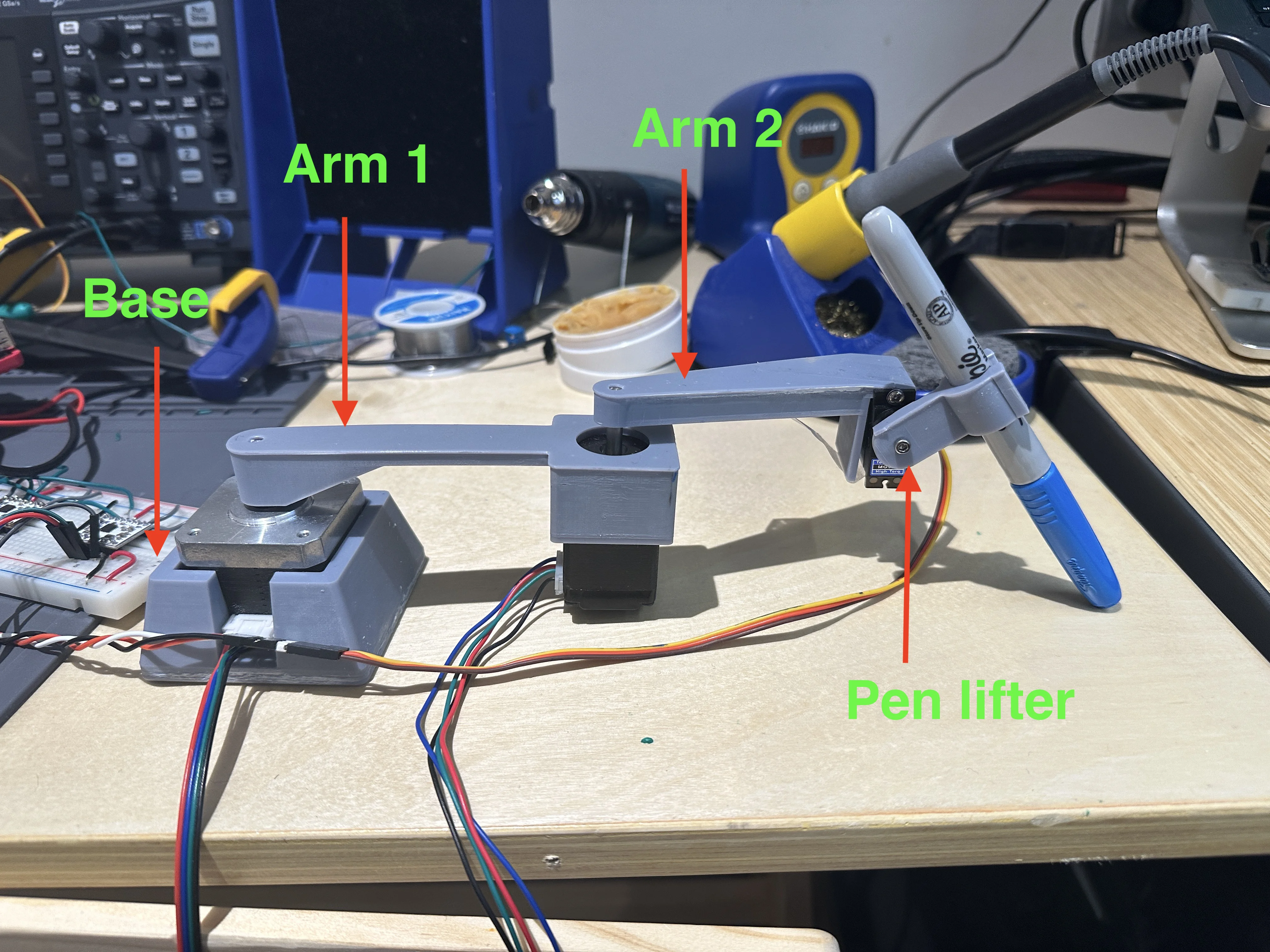
“Tidy Plotter” is a 2-D drawing machine that uses a robotic arm design to reproduce jpeg or png images on flat surfaces. It’s built with 3-D printed arms, two stepper motors, and a servo motor. The software, using OpenCV for image processing, translates the images into a series of points for the plotter to follow.
“GHOSTGPT” CLI/TELEGRAM CHATBOT WITH GPT/DALL-E
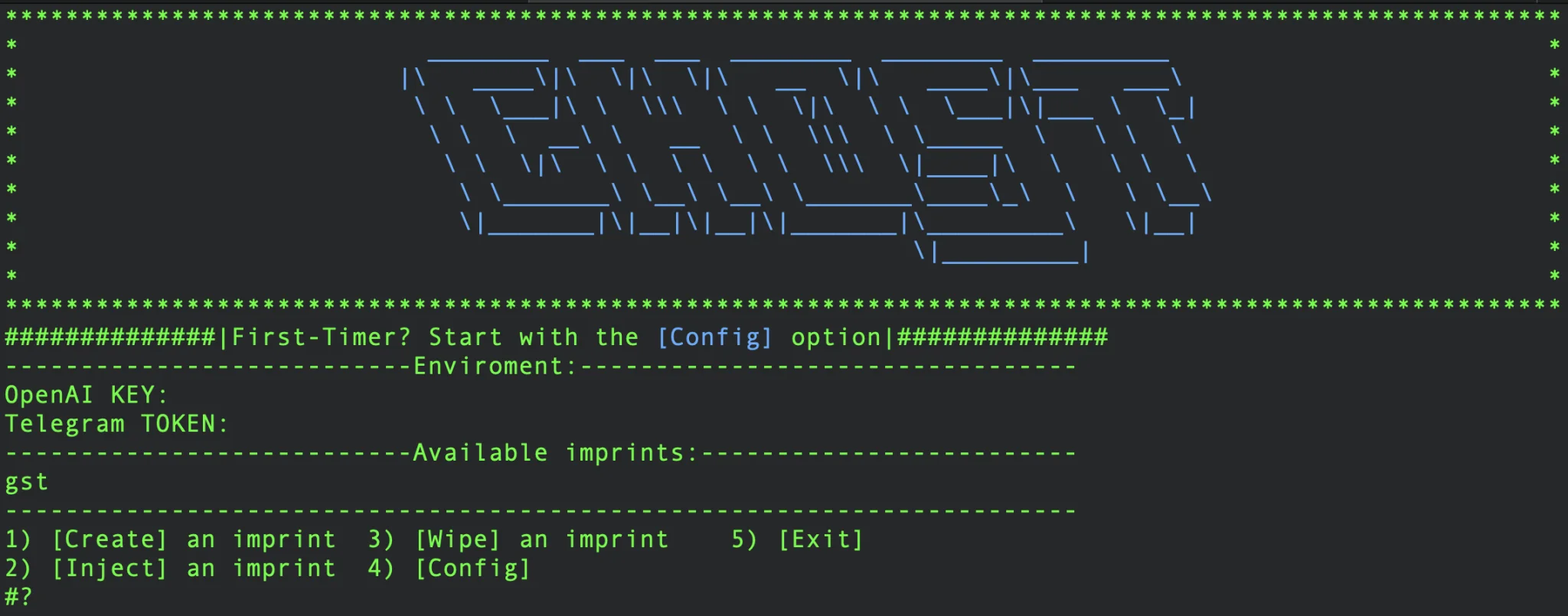
“GhostGPT” is a muti-platform GPT/DALL-E based ChatBot/Image Generator. With Ghost, you can create locally stored ‘neural imprints’ (.ni files) which for now are basically chat histories that shape Ghost’s behavior. And you can also load imprints created by other people into Ghost to give it different personalities or features.